ラインコーディング

黒色の走行ラインにカラーコードを追加して、目的地に到達できるようにプログラミングするコーディング方法です。ロボットを動かす方向を計画して効率的にアルゴリズムを設計する方法を学ぶことができます。目的地を目指したり、交通安全教育など様々なミッションを通じて問題解決能力を育むことができます。
ラインコーディングを始める




- ロボットの電源を入れます。
- ロボットのお腹の部分のLEDが虹色に変わります。
- ロボットの中心を黒いラインの右側の縁に合わせて乗せ、ボタンを一回クリックします。
- 「ピッピッ」というメロディとともに動作状態表示灯が黄色に変わり、黒いラインに沿って動きだします。
- 黒いラインの右側に配置されたカラーコードを認識すると、同じ色のLEDが点灯し、そのカラーコードの命令通りにロボットが動きます。
※ ロボットはラインの右側の縁を読み込んで動きます。カラーコードはロボットの走行方向右側に配置します。
走行ラインを描く
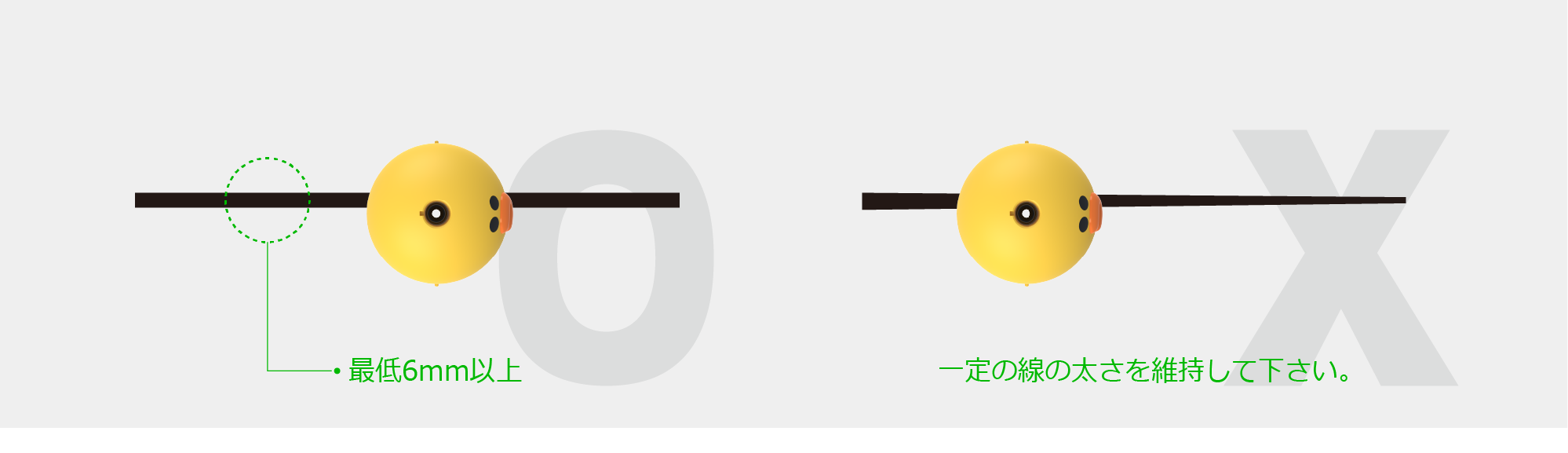
- ロボットは黒い走行ラインの右側の縁に沿って移動します。
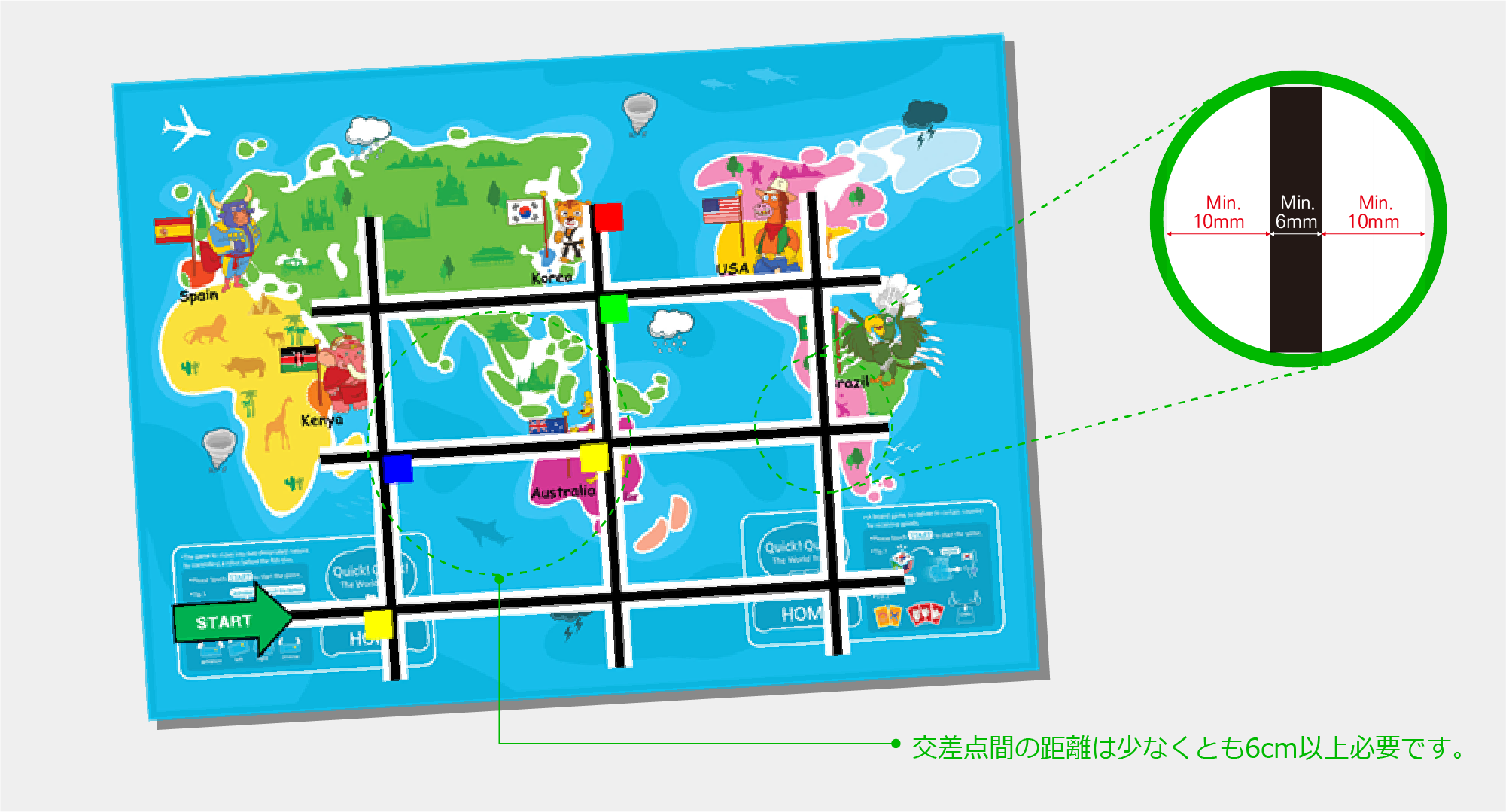
- 黒線で、幅最低6mm以上の均一な太さの線が走行ラインとして最適です。線の太さが細くなると、ロボットが走行ラインから脱線する可能性があります。
- カラーコードを認識すると、それぞれの色の命令を実行します。
色別の走行命令
| カラー | 走行命令 | |
|---|---|---|
| Green | 緑 | 直進 |
| Blue | 青 | 右折 (TURN RIGHT) |
| Yellow | 黄色 | 左折 (TURN LEFT) |
| Magenta | マゼンタ | Uターン (U-TURN) |
| Orange | オレンジ | 左のラインにジャンプ (JUMP to LEFT) |
| Cyan | シアン | 右のラインにジャンプ (JUMP to RIGHT) |
| Red | 赤 | 停止(STOP) / 目的地(GOAL)到着 |
カラーコードの塗り方
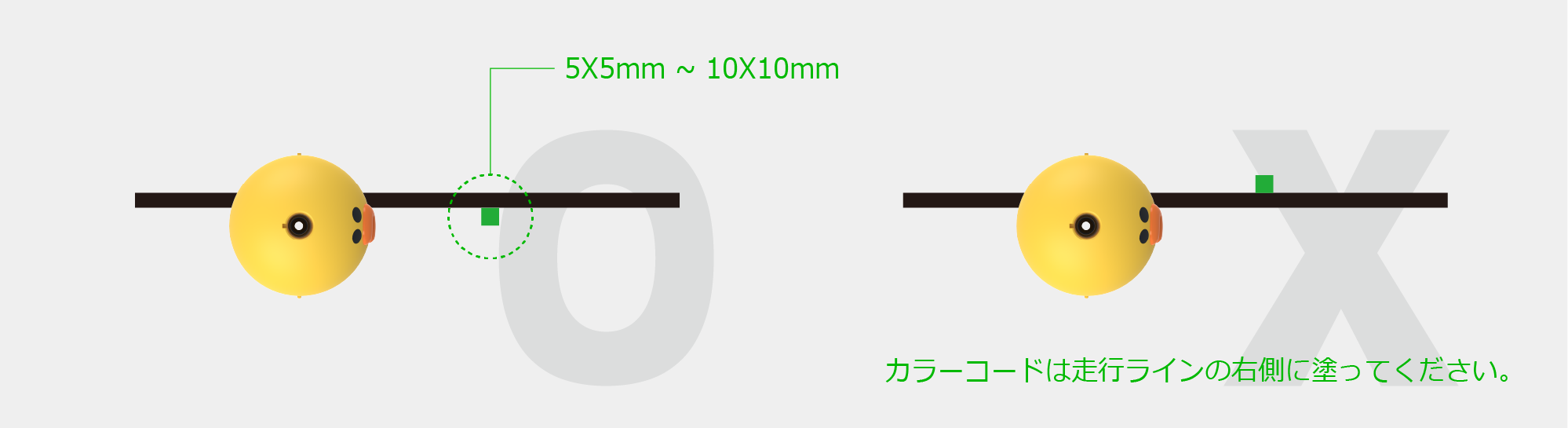
- ロボットから見て、走行ラインの右側に塗られたカラーコードを認識します。
- カラーは5mm~10mm四方に塗ってください。四角く塗りつぶすか、幅広のペン先の専用マーカーで塗ります。
- クレヨンや色鉛筆を使用すると、キャスターに異物が付着したり滑ったりして故障または誤作動の原因となるので使用しないでください。
- ペンがない場合、カラーステッカーを貼ってカラーコードを作ることもできます。ステッカーを使うと、間違ったカラーコードを貼ってもステッカーを重ねて貼り付けてコードを修正できるので便利です。

ラインコーディングのカラーコードの例
- 直線での動作
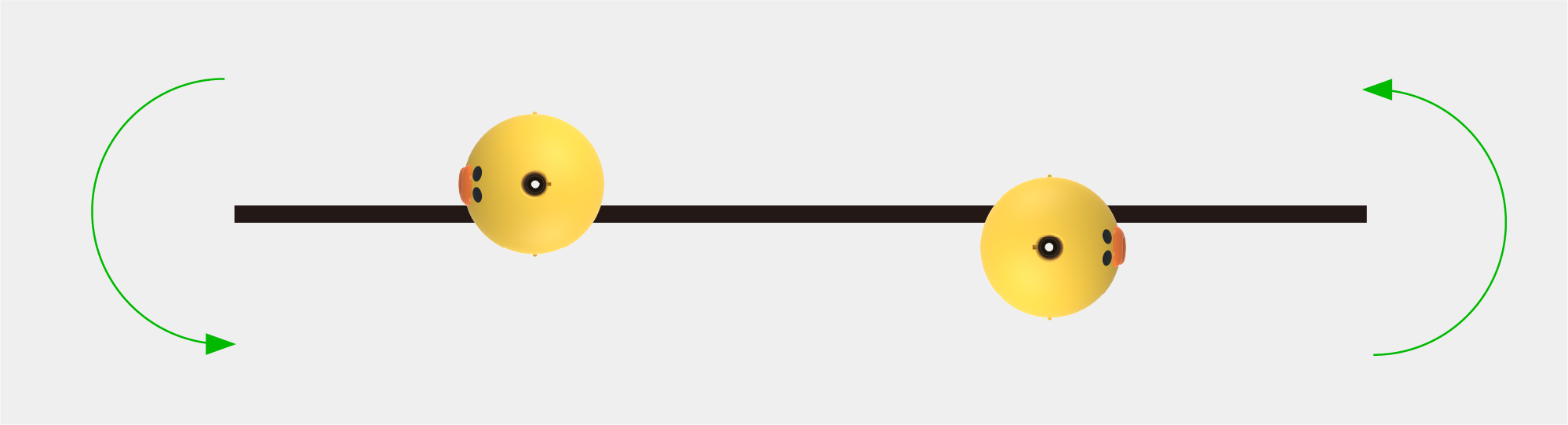
黒色の走行ラインだけの場合、右側の縁に沿って走行し、線の端で大きな円を描きながら走行ラインに戻ります。
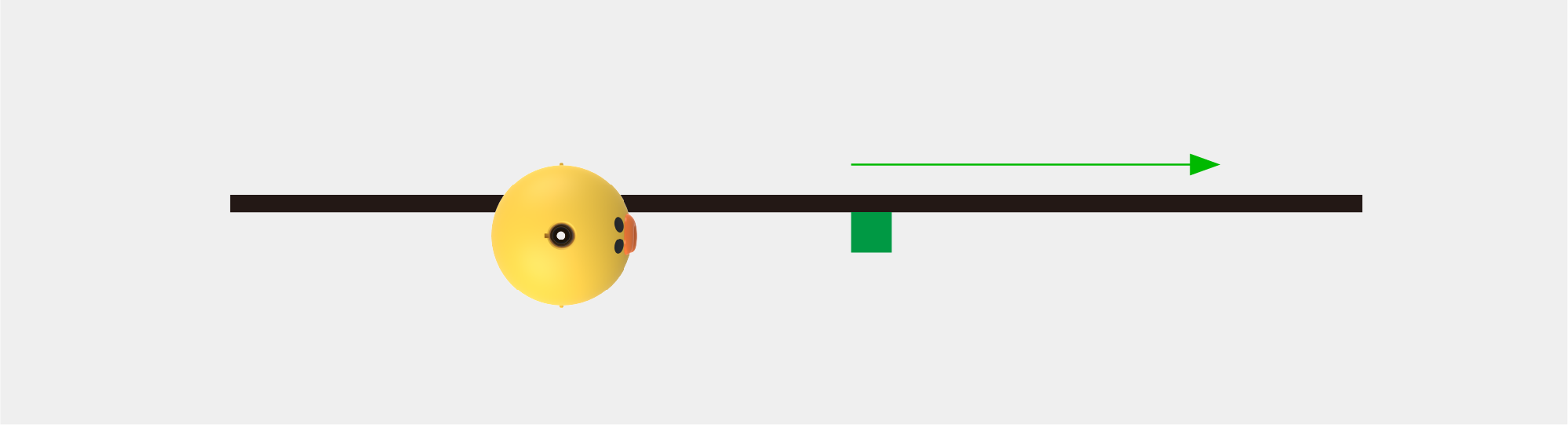
直線上で緑のカラーコードに触れると、そのまま通過して走行します。
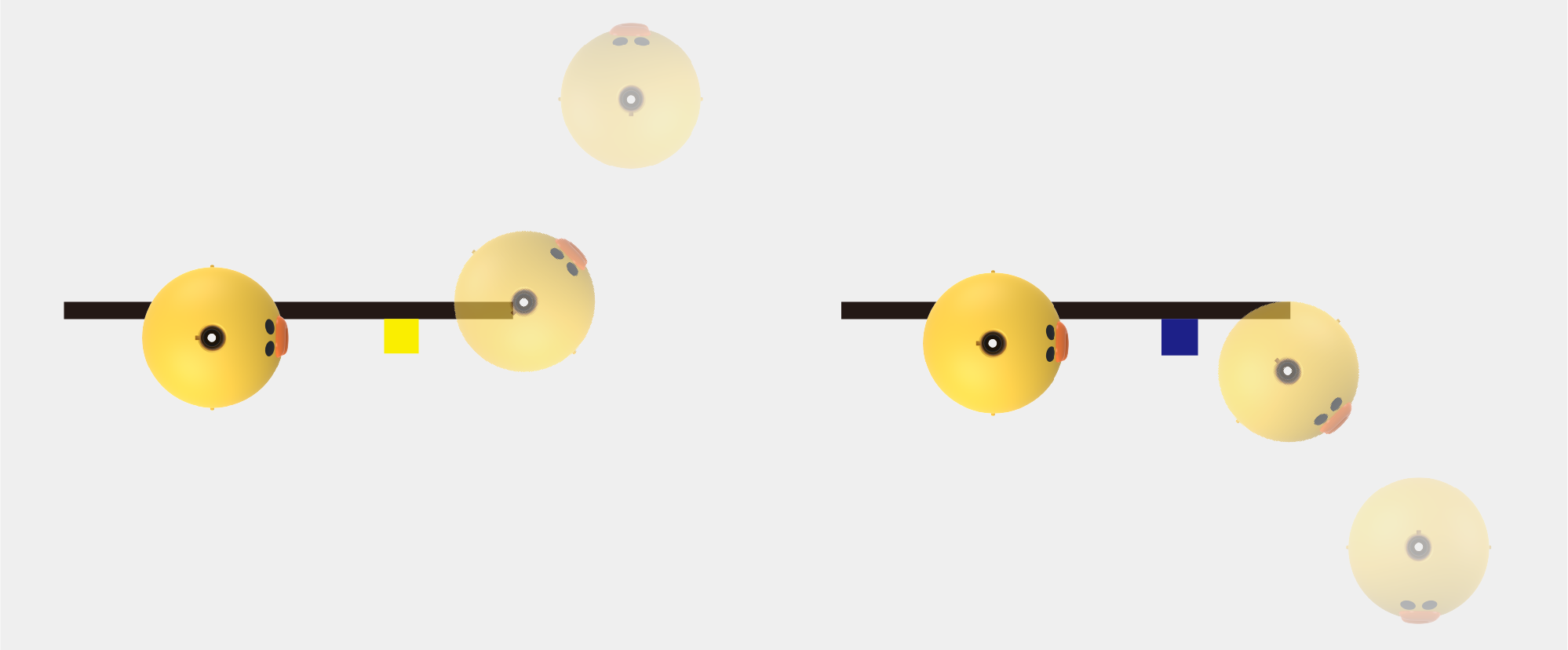
直線で青と黄色のカラーコードを使用すると、ロボットが走行ラインから外れるので使用しないで下さい。
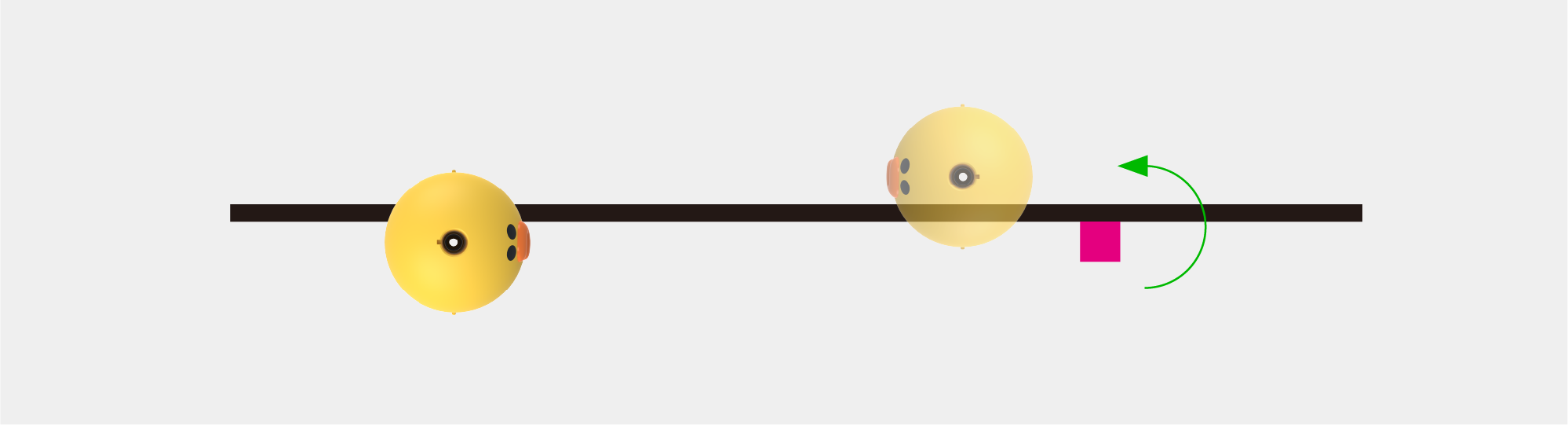
マゼンタはその場で180度回転した後、道路に沿って直進し続けます。
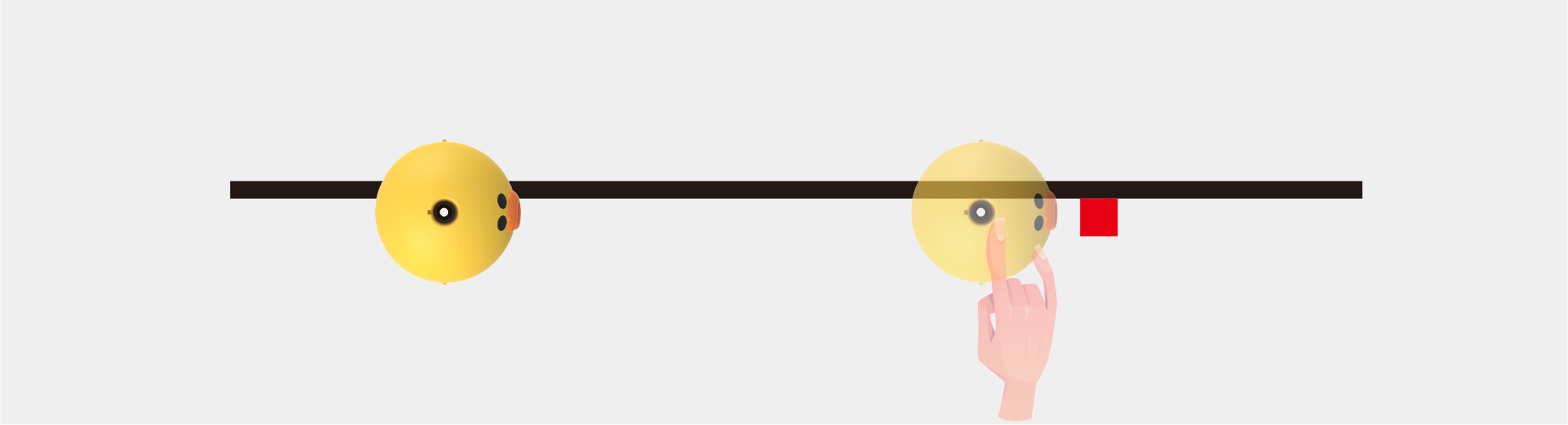
赤は停止します。再び出発するにはボタンをクリックします。
- 交差点での動作
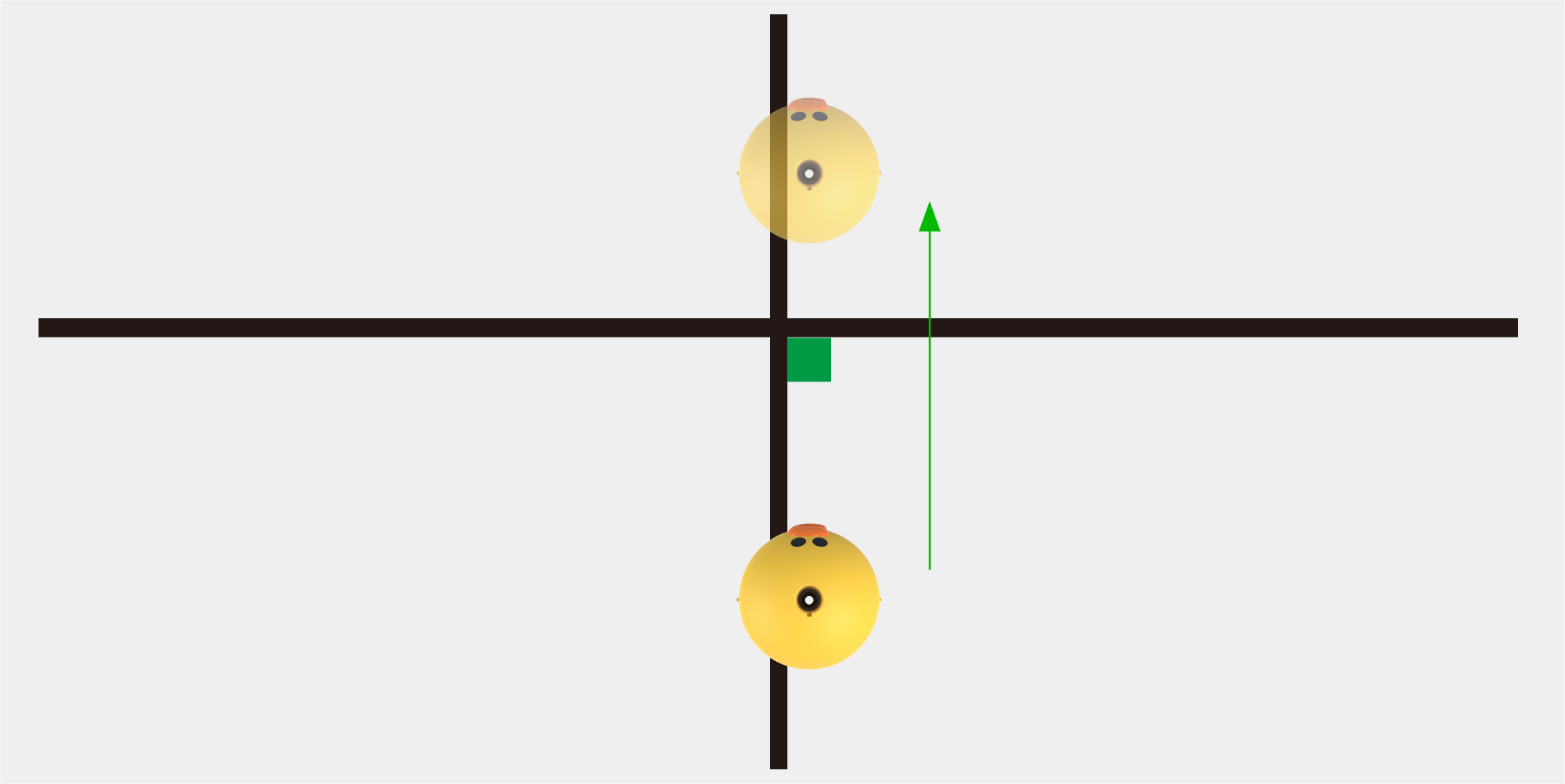
緑は交差点で直進します。ただし、T字の交差点では道路を超えます。
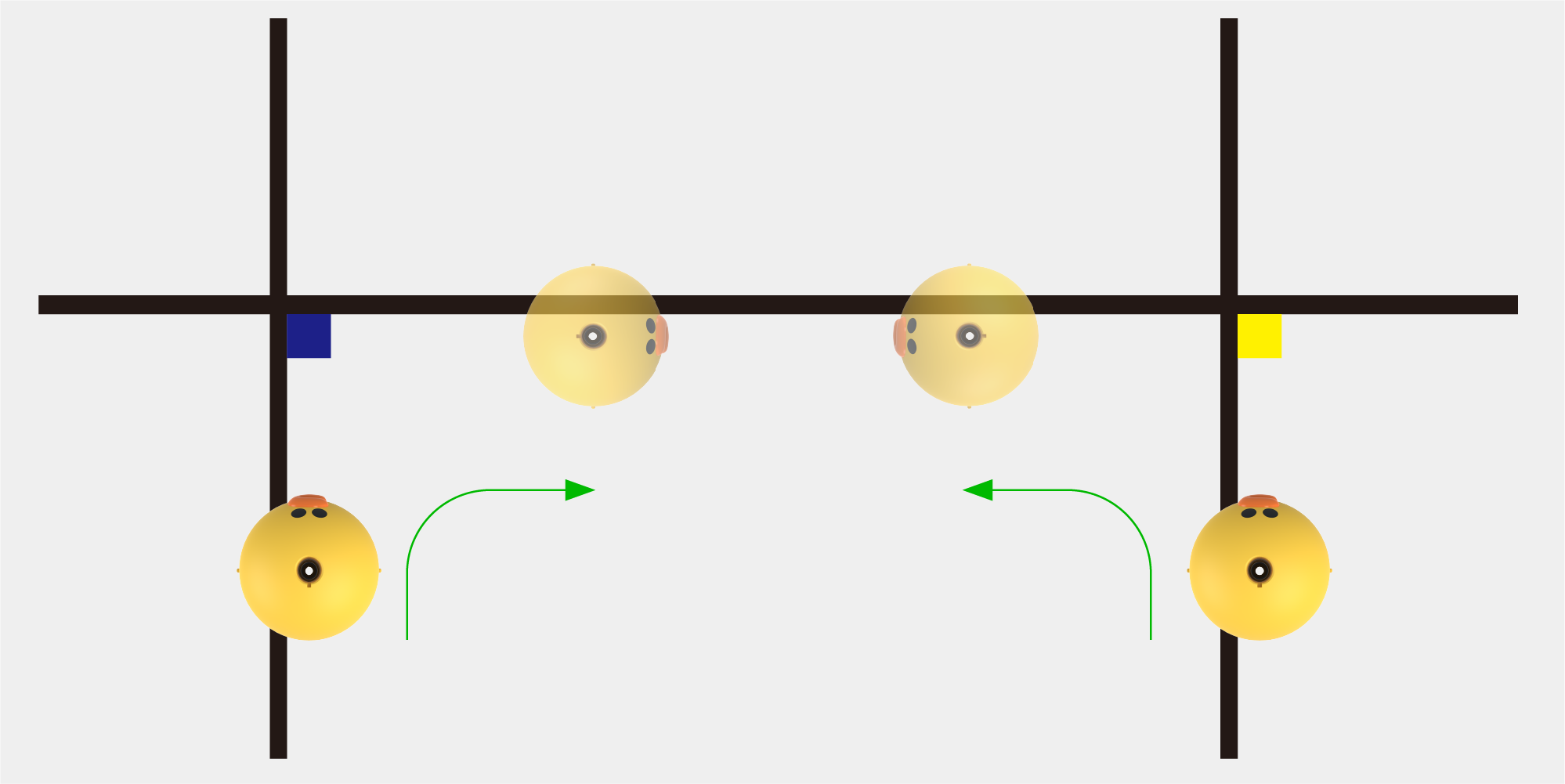
青は交差点で右折します。つまり、右側の道路に沿って走行を続けることを意味します。
塗らなくても右側の道路に沿って動きますが、正確な動作のために交差点で使用します。
黄色は交差点で左折します。
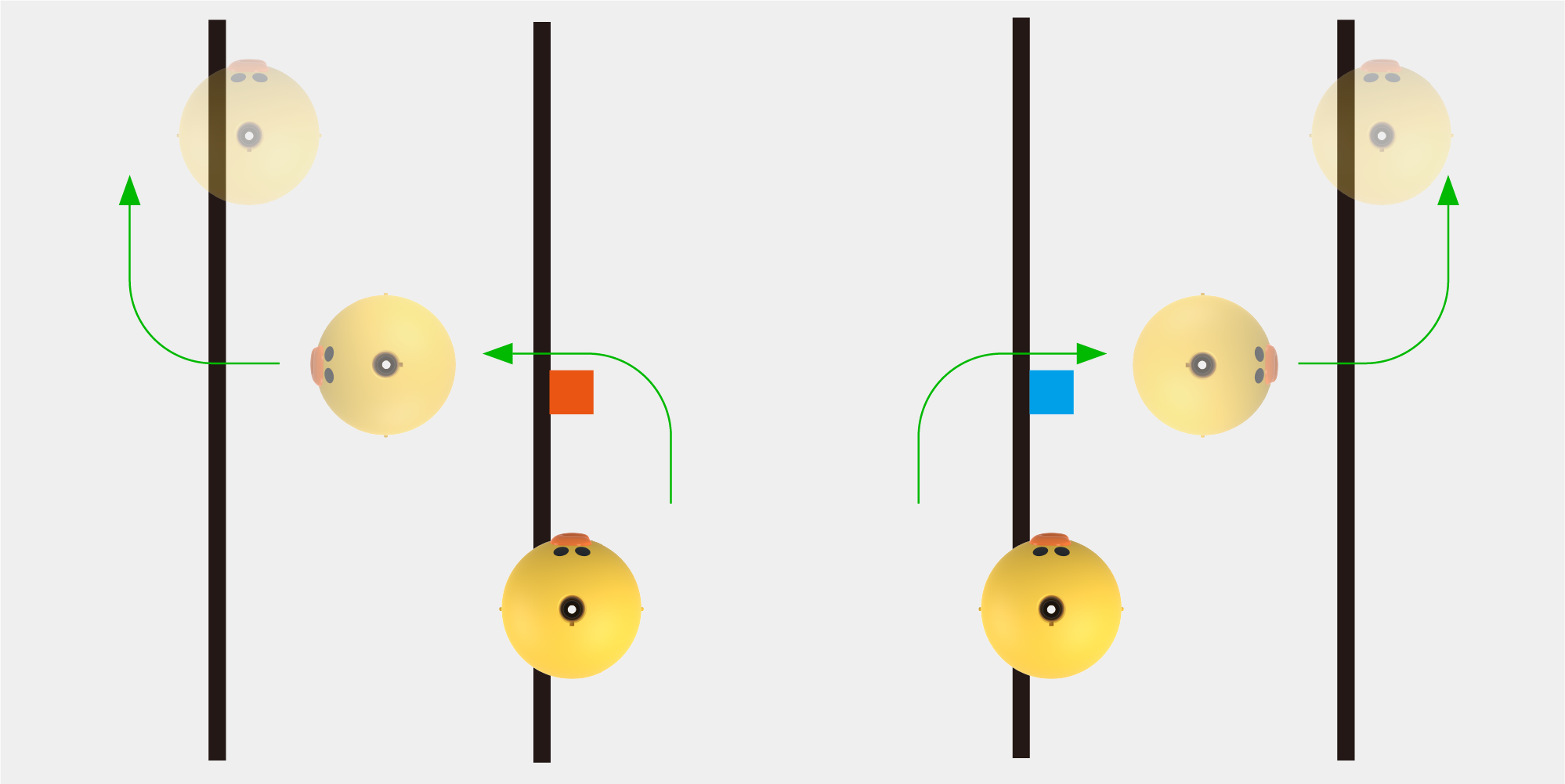
オレンジは左の走行ラインにジャンプします。左側の走行ラインに移動しても、進行方向は同じです。
シアンは右の走行ラインにジャンプします。右側の走行ラインに移動しても、進行方向は同じです。
ラインコーディングのカラーコードの例
直線道路

T字型の道路

十字型の交差点

- 直線道路では左右2箇所、T字交差点では3箇所、交差点では4カ所にコマンドを指定することができます。すべての進行方向に応じて異なるコマンドが使用できます。
授業活動での資料の例
背景に色や絵がある場合は、走行ラインの左右に幅10mm以上の白線が必要です。
ラインコーディングの際の注意事項

印刷物にシワがあったりテーブルが平らでない場合、ラインのトレーシングに失敗することがあります。

必ず平らなテーブルの上で、印刷物をテーブルに密着させて使用して下さい。

カラー認識が正常に行われない場合は、カラーセンサーのホワイトバランスの調整を行って下さい。

直射日光や強い光を当てて使用する場合、カラーセンサに影響を与えて正常に動作しない可能性があります。

クレヨンや色鉛筆などを使用すると、キャスターに異物が挟まったり滑って故障や誤動作の原因となることがあるので、使用しないで下さい。